本项目旨在实现一款室内自主清扫机器人的导航系统。 机器人需要能够在未知环境中自主建图, 并根据建图结果规划清扫路径, 最终实现全覆盖清扫。
系统基于ROS(Robot Operating System)框架开发, 采用模块化设计,各功能节点通过ROS话题/服务进行通信, 便于调试和功能扩展。
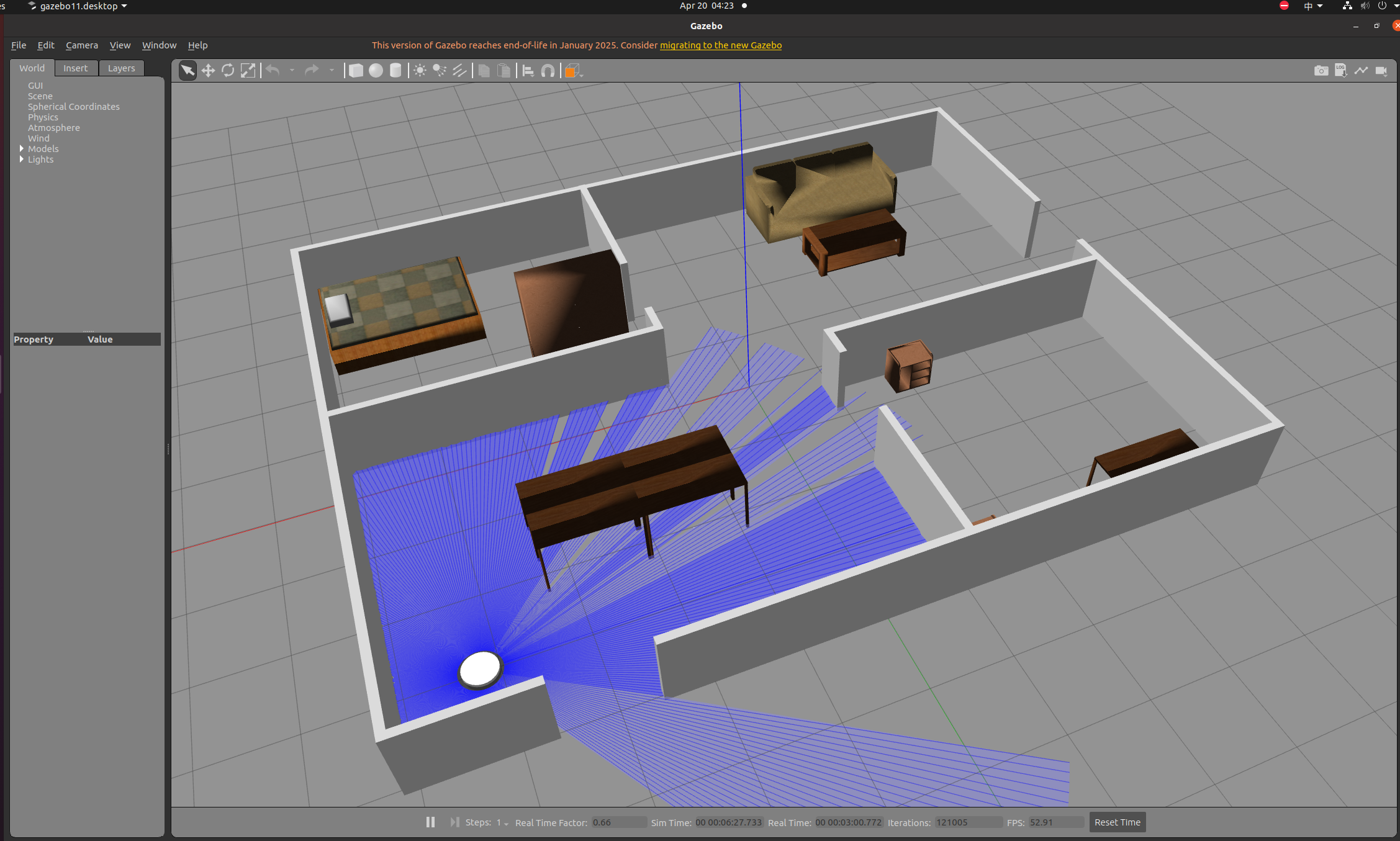
基于ROS框架实现室内自主清扫机器人的SLAM建图与路径规划。 系统集成激光雷达SLAM、全局/局部路径规划、清扫区域覆盖算法, 实现从建图到自主清扫的全流程自动化。
本项目旨在实现一款室内自主清扫机器人的导航系统。 机器人需要能够在未知环境中自主建图, 并根据建图结果规划清扫路径, 最终实现全覆盖清扫。
系统基于ROS(Robot Operating System)框架开发, 采用模块化设计,各功能节点通过ROS话题/服务进行通信, 便于调试和功能扩展。
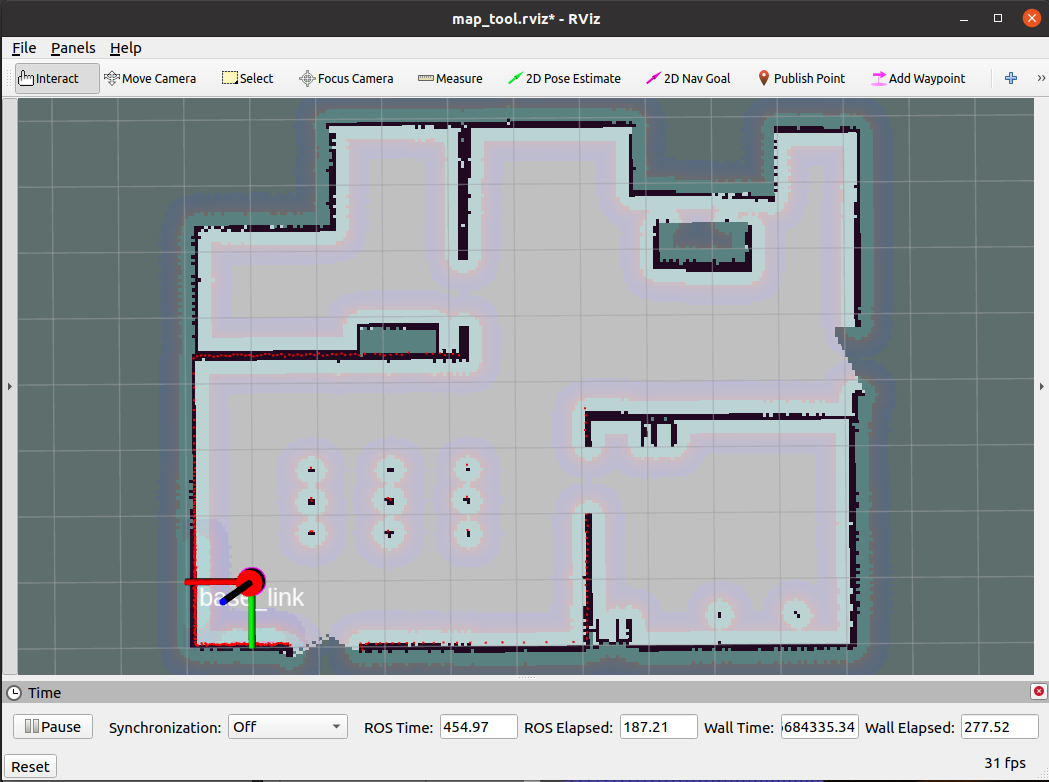
基于激光雷达的GMapping算法实现2D栅格地图构建。机器人通过遥控或自主探索方式遍历环境,实时构建环境地图,为后续路径规划提供空间信息。
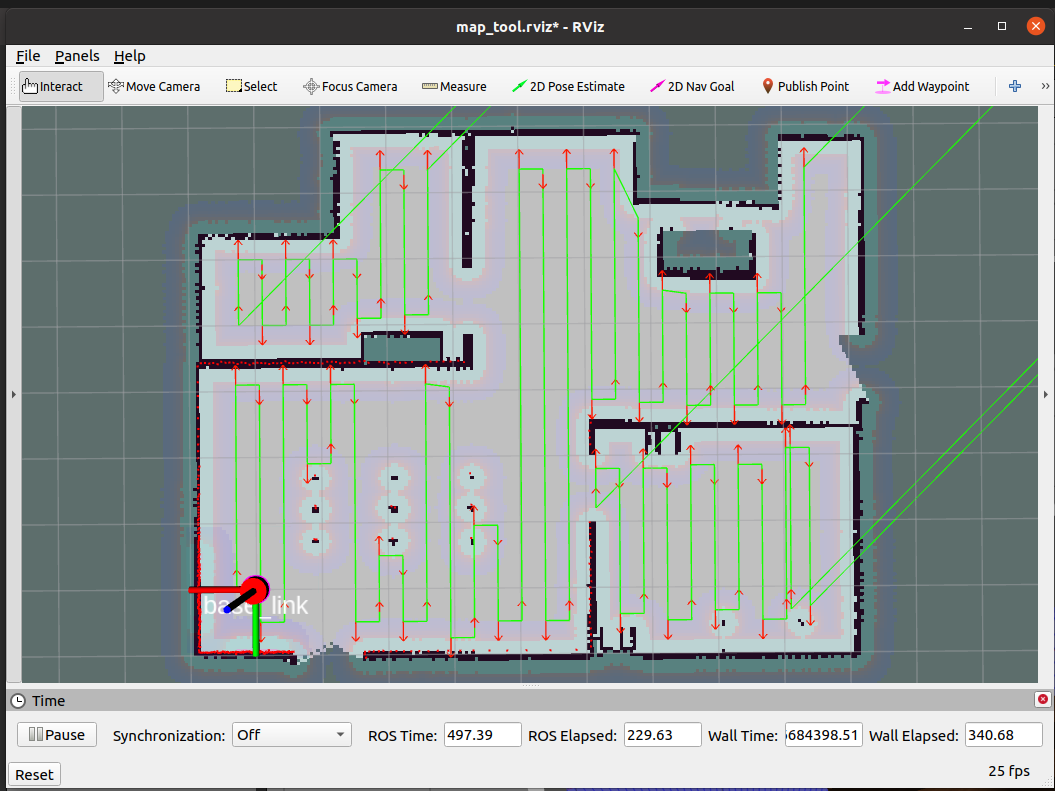
采用A*算法在已知地图上规划从起点到目标点的最优路径。结合清扫区域划分策略,将待清扫区域分解为多个子区域,依次规划清扫路径。
基于DWA(Dynamic Window Approach)算法实现局部避障与路径跟踪。在全局路径引导下,实时检测动态障碍物并调整运动轨迹,确保安全行驶。
采用弓字形覆盖策略,确保清扫区域无遗漏。结合地图边界检测,自动识别可清扫区域范围,生成全覆盖清扫路径点序列。
| 参数 | 数值 | 说明 |
|---|---|---|
| 建图算法 | GMapping | 基于粒子滤波的2D SLAM |
| 全局规划 | A* | 栅格地图最优路径搜索 |
| 局部规划 | DWA | 动态窗口避障 |
| 覆盖策略 | 弓字形 | 确保无遗漏全覆盖 |
| ROS版本 | Noetic | Ubuntu 20.04 LTS |
系统在 Gazebo 仿真环境中完成了从建图到自主清扫的全流程验证。 机器人能够在仿真地图中自主规划弓字形清扫路径并完成覆盖, 模块化的 ROS 架构便于后续功能扩展和算法优化。 本课程项目侧重于理解 ROS 导航栈的工作原理与系统集成方法。