哨兵机器人是 RoboMaster 机甲大师赛中负责全场自主防御的核心兵种,需要在比赛中自主完成目标搜索、识别、瞄准与射击的全流程。本人作为云台机械负责人,独立承担了第二代云台系统的全部机械结构设计工作。
基于该云台硬件平台,团队同时申请了国家级大创"侦、识、打一体式自主巡防机器人"和省级大创"雷视融合全向语义感知系统",云台搭载毫米波雷达、RGB相机、深度相机等多传感器,为感知算法团队提供物理载体。
RoboMaster 机甲大师赛中负责全场自主防御的哨兵机器人。本人担任云台机械负责人,独立完成第二代云台全部机械结构设计,包括双 Yaw 轴驱动、鹅颈弹链、热管理等五项创新方案。基于该云台硬件平台,团队衍生出国家级大创"侦、识、打一体式自主巡防机器人"和省级大创"雷视融合全向语义感知系统"。
哨兵机器人是 RoboMaster 机甲大师赛中负责全场自主防御的核心兵种,需要在比赛中自主完成目标搜索、识别、瞄准与射击的全流程。本人作为云台机械负责人,独立承担了第二代云台系统的全部机械结构设计工作。
基于该云台硬件平台,团队同时申请了国家级大创"侦、识、打一体式自主巡防机器人"和省级大创"雷视融合全向语义感知系统",云台搭载毫米波雷达、RGB相机、深度相机等多传感器,为感知算法团队提供物理载体。
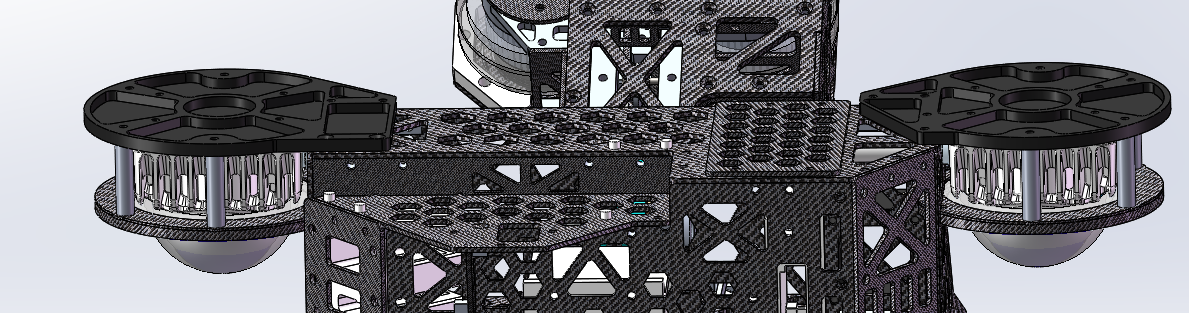
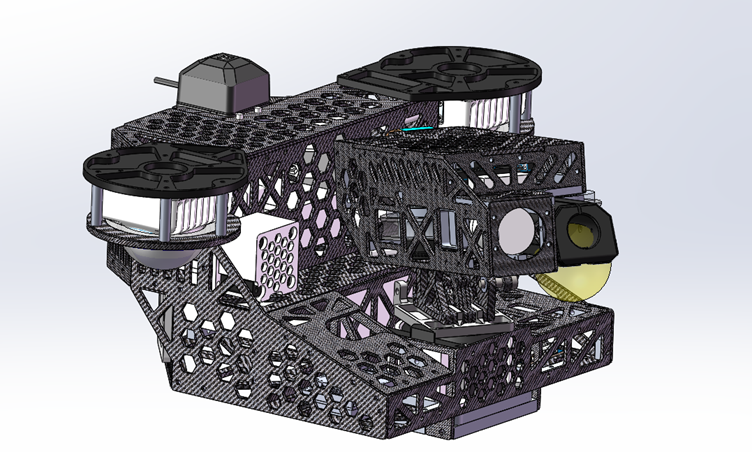
云台是机器人感知系统的核心载体,承载雷达、视觉相机等传感器,负责对目标的快速跟踪与精确瞄准。 第一代云台在实际比赛中暴露出响应速度不足、内部走线拥挤、热干涉严重、维护困难等问题。 第二代云台从五个维度进行系统性创新设计:
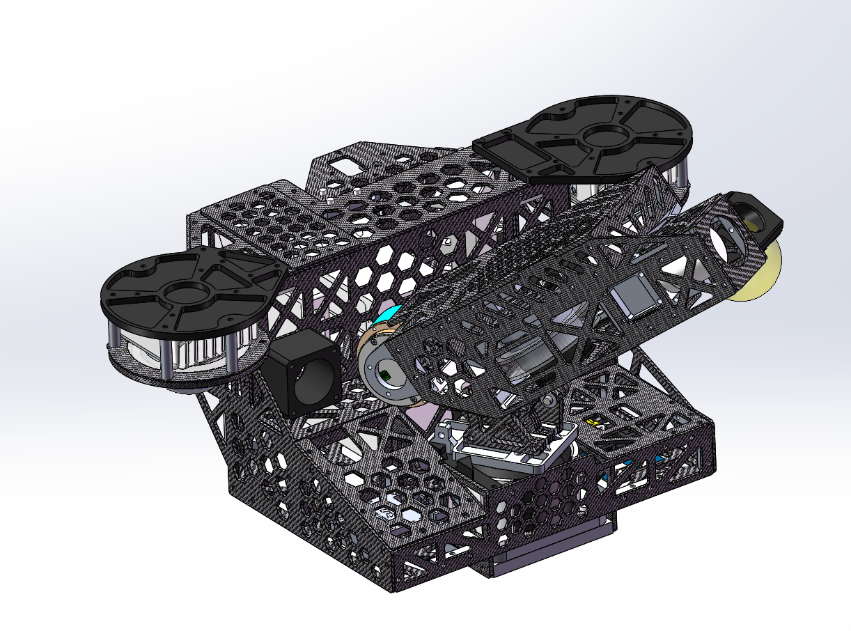
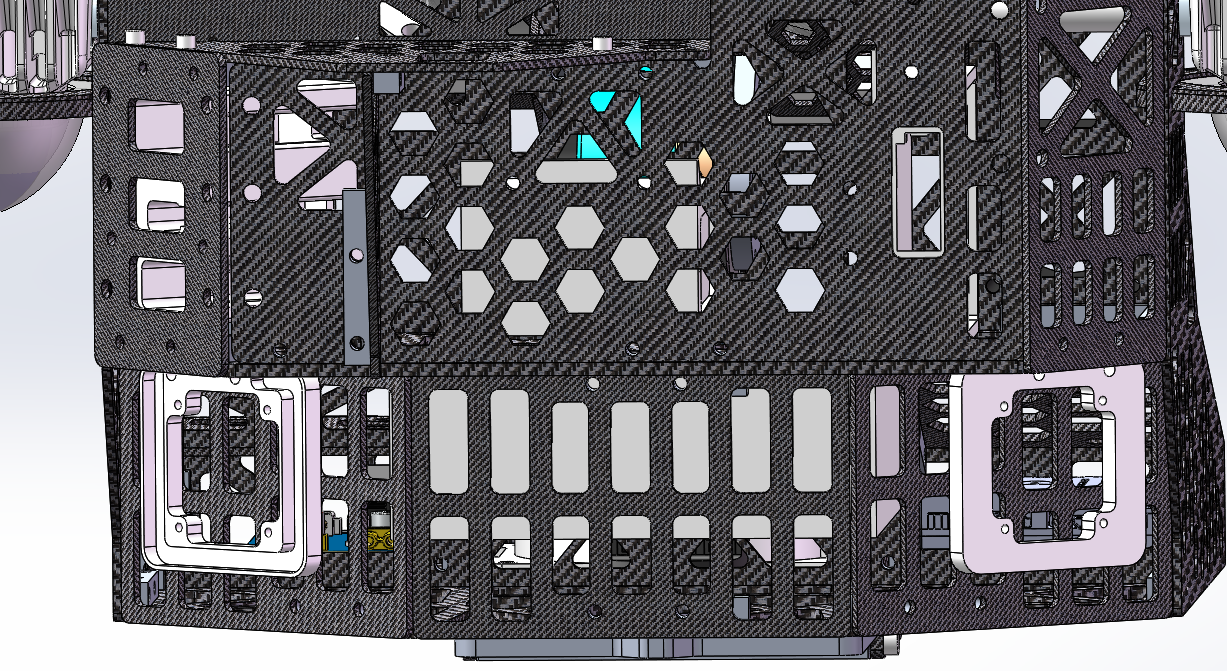
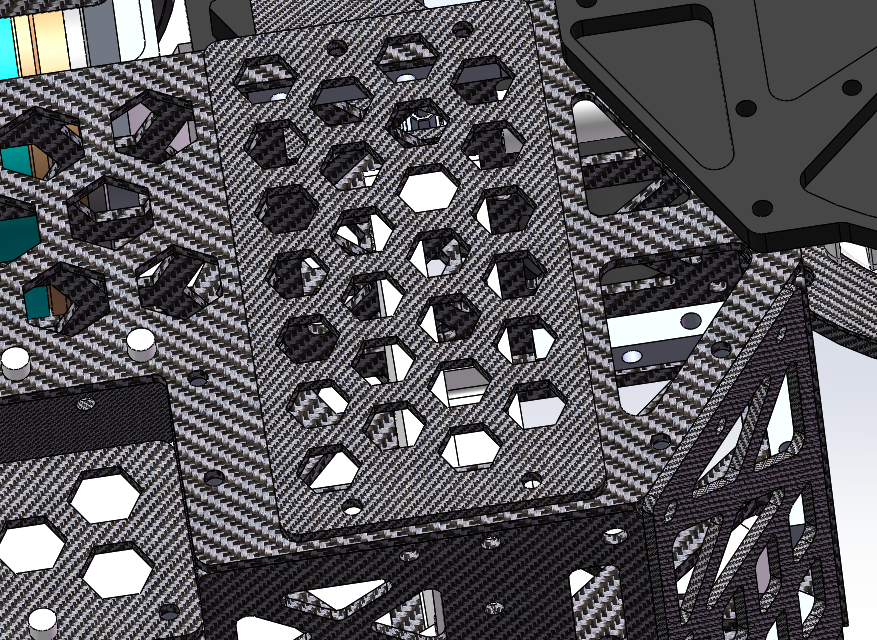
沿用一代车的雷达安装接口设计,分析关键受力部位后对结构件进行镂空处理。在保证整体强度不降低的前提下更换部分材料,实现结构减重。采用镜像对称布局策略,使云台两侧质量分布均匀,降低后期调试中的配平难度。
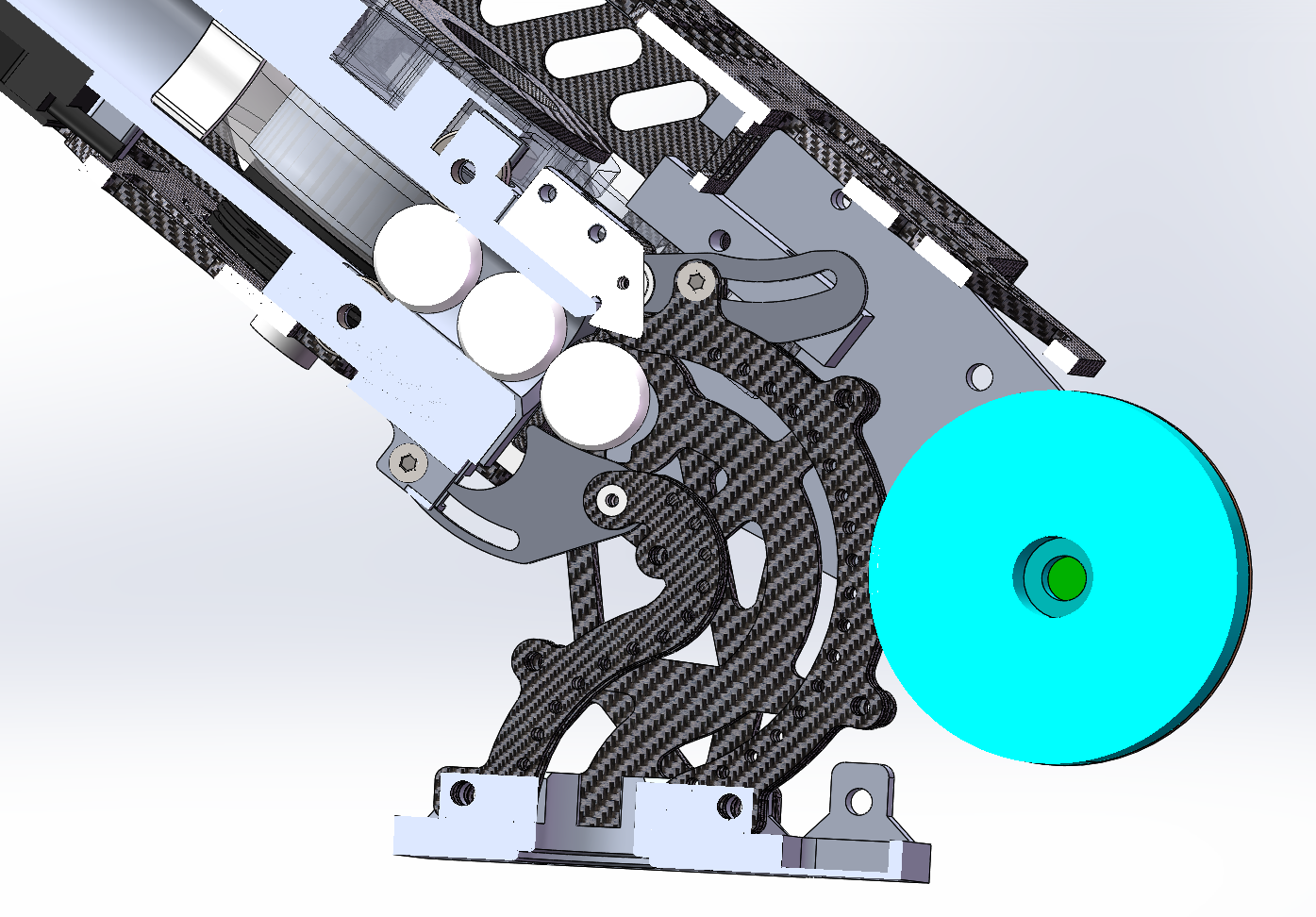
突破传统单自由度运动学约束,提出分级式Yaw轴驱动方案。一级Yaw轴负责大范围粗调,二级Yaw轴实现精确定位。采用齿轮+同步带混合传动方案,平衡扭矩传递效率与运动平稳性,使目标锁定响应时间大幅缩短。
为适配大小Yaw轴的非对称空间构型,创新设计鹅颈状弹链路径。该弹链能够在云台大角度往复旋转时自适应弯曲,解决传统螺旋线或弹簧线的缠绕与疲劳断裂问题,同时大幅节省云台内部空间。
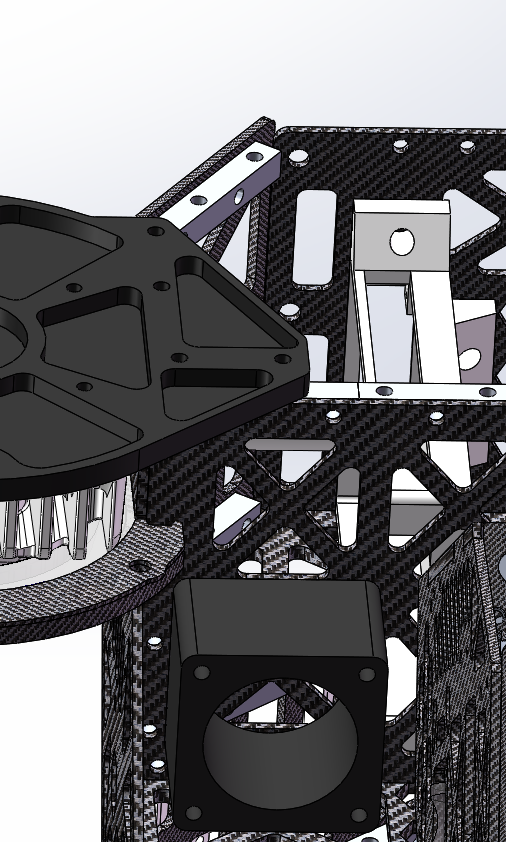
基于一代系统热管理缺陷分析,重构NX模块与NUC单元的布局。将两者分置于风道上下游,采用热流路径隔离设计避免热风回流。为NX组件开发独立散热架构,集成微型风扇与定向导流通道。
针对NX组件线缆接口深埋难以操作的痛点,设计合页翻盖式结构。掀开盖板后即可直接操作接口,同时起到防松脱防护作用。调试端口采用独立隔离式布局方案,与主控接口物理分离。

基于哨兵云台硬件平台,团队衍生出两项大学生创新创业训练计划项目:
第二代云台在设计之初即为多传感器共架预留了安装接口与散热通道,为两项大创提供了稳定、轻量的物理载体。
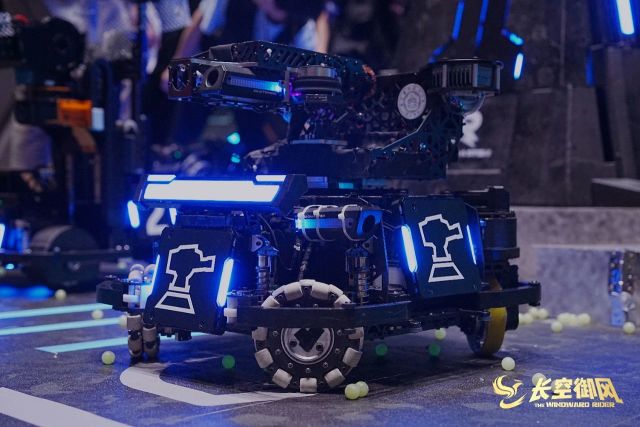
RoboMaster 2025 全国赛一等奖(十六强),第二代云台系统通过比赛实战验证。基于同一云台平台,衍生国家级大创(巡防机器人)和省级大创(雷视融合)两项立项,完成多传感器搭载与算法联调验证。