DOSSIER NO. 001 // ROBOTICS ENGINEER // NUAA
CLASSIFIED
★
2023–2027
刘雅心
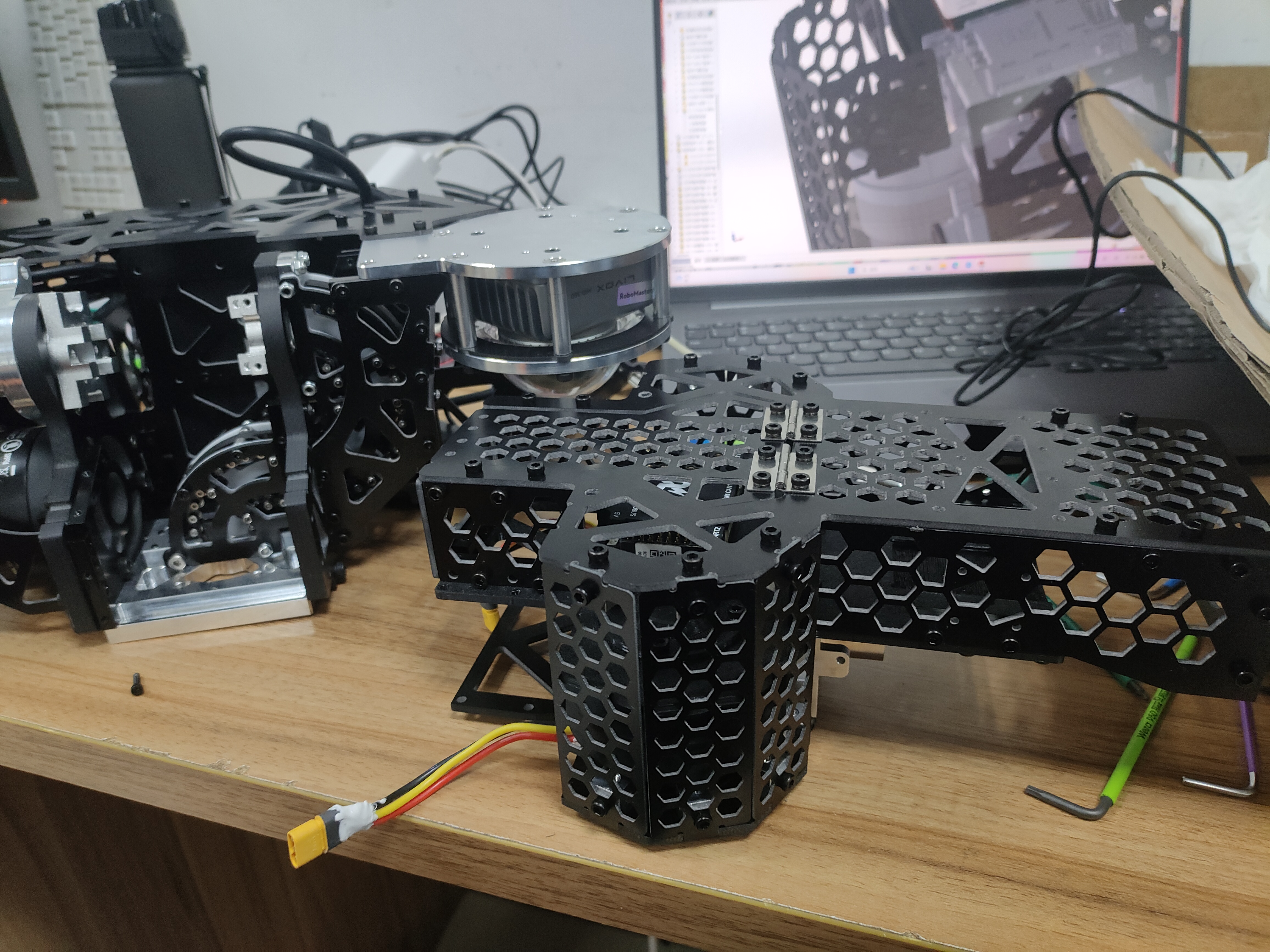
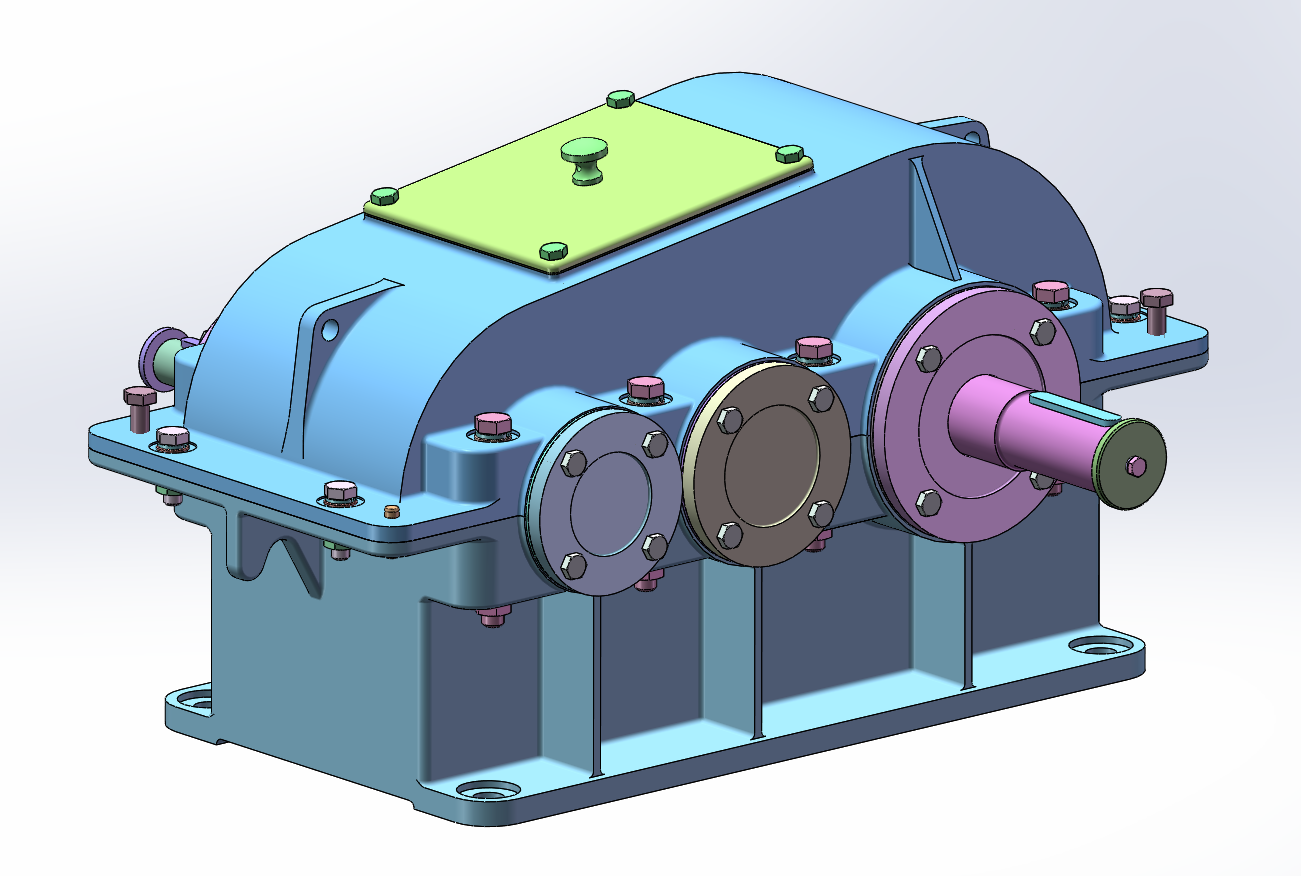
从结构设计到系统集成,让机器人从图纸走向现实
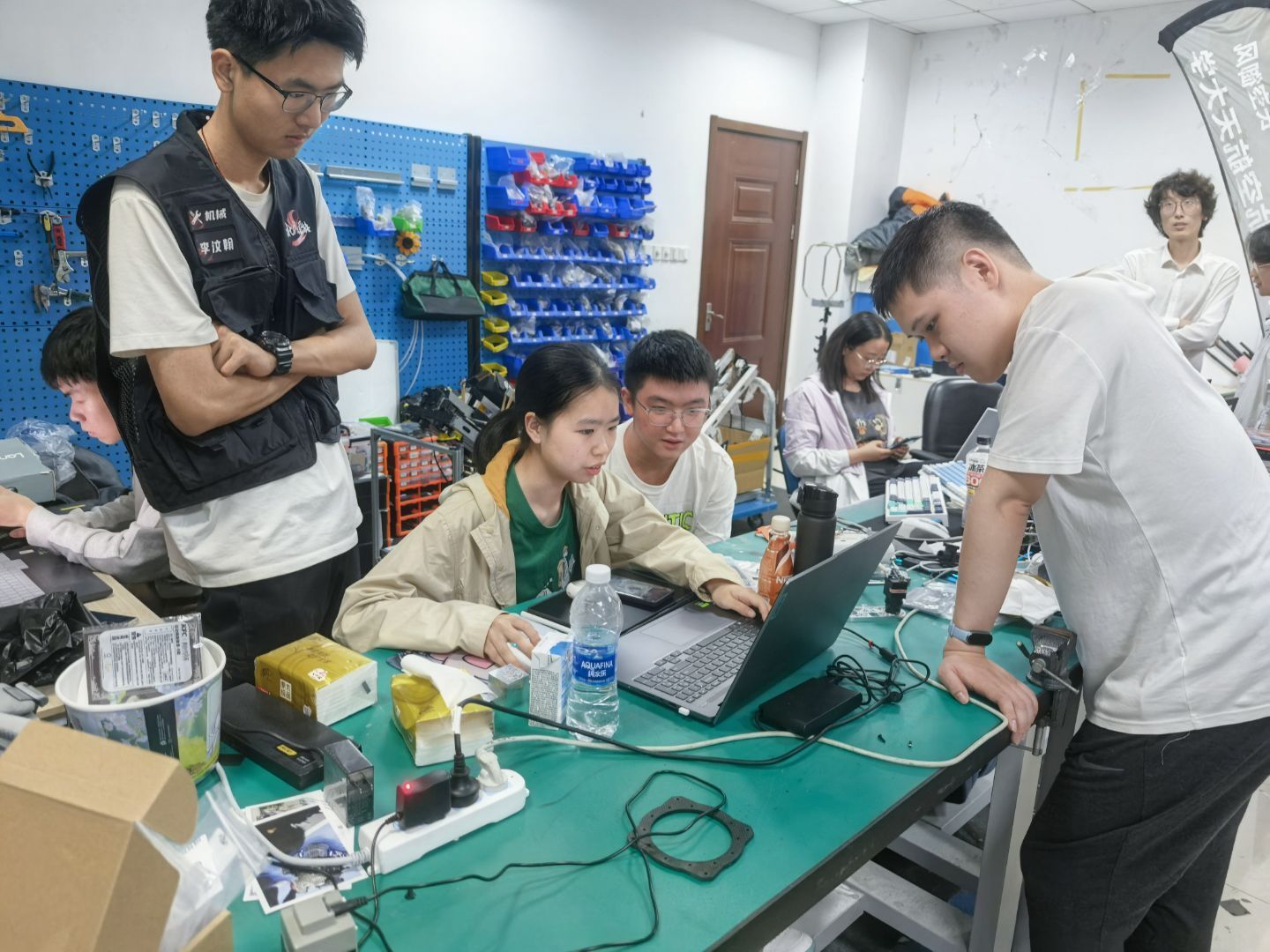
南京航空航天大学机器人工程专业。大二以云台机械负责人身份获 RoboMaster 全国一等奖,具备从结构设计到系统集成的完整项目经验。目前在寻找机器人/机械方向的科研或工程实习机会。
GPA
89/100
RANK
6/58
PROJ
6+
AWARD
5+

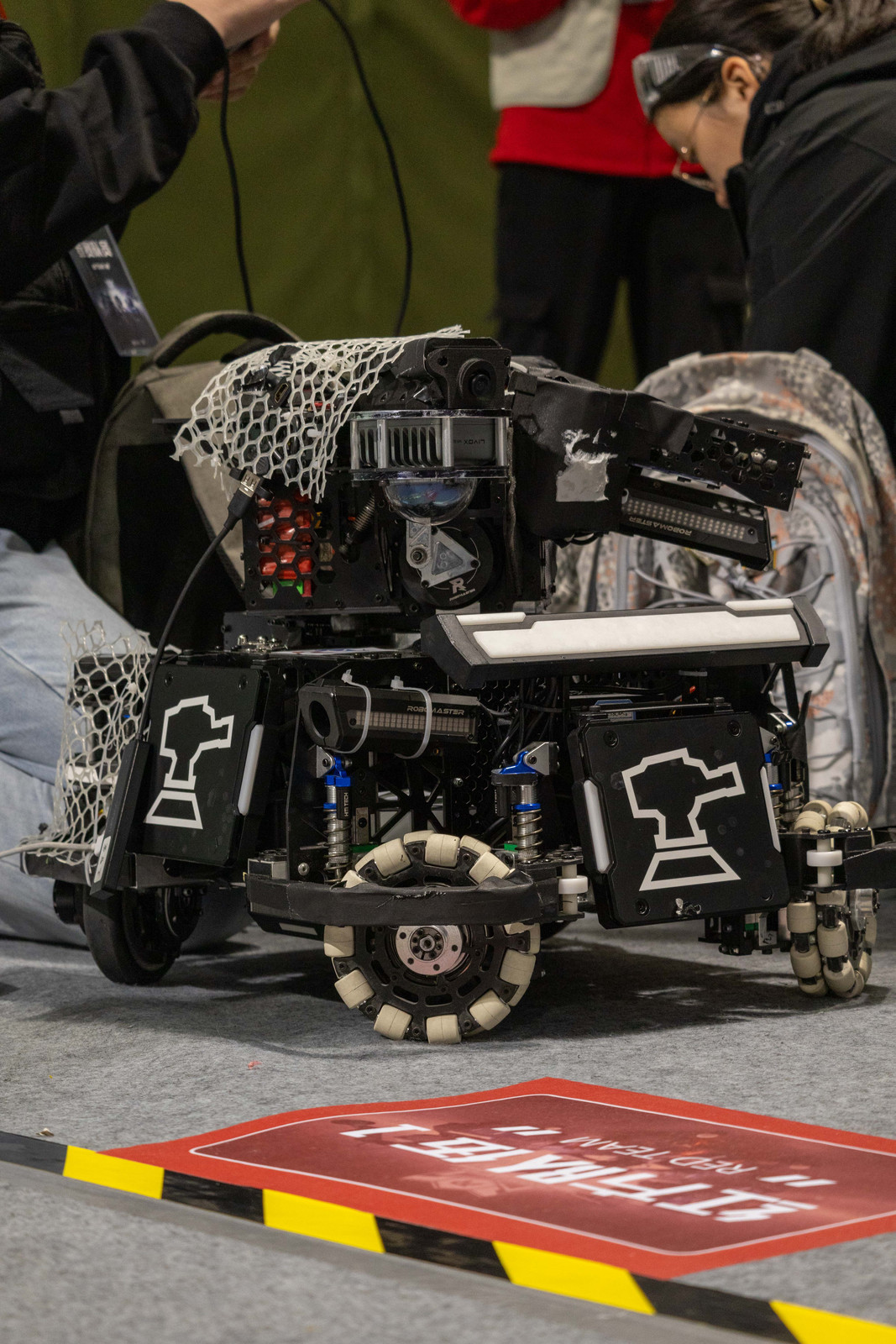
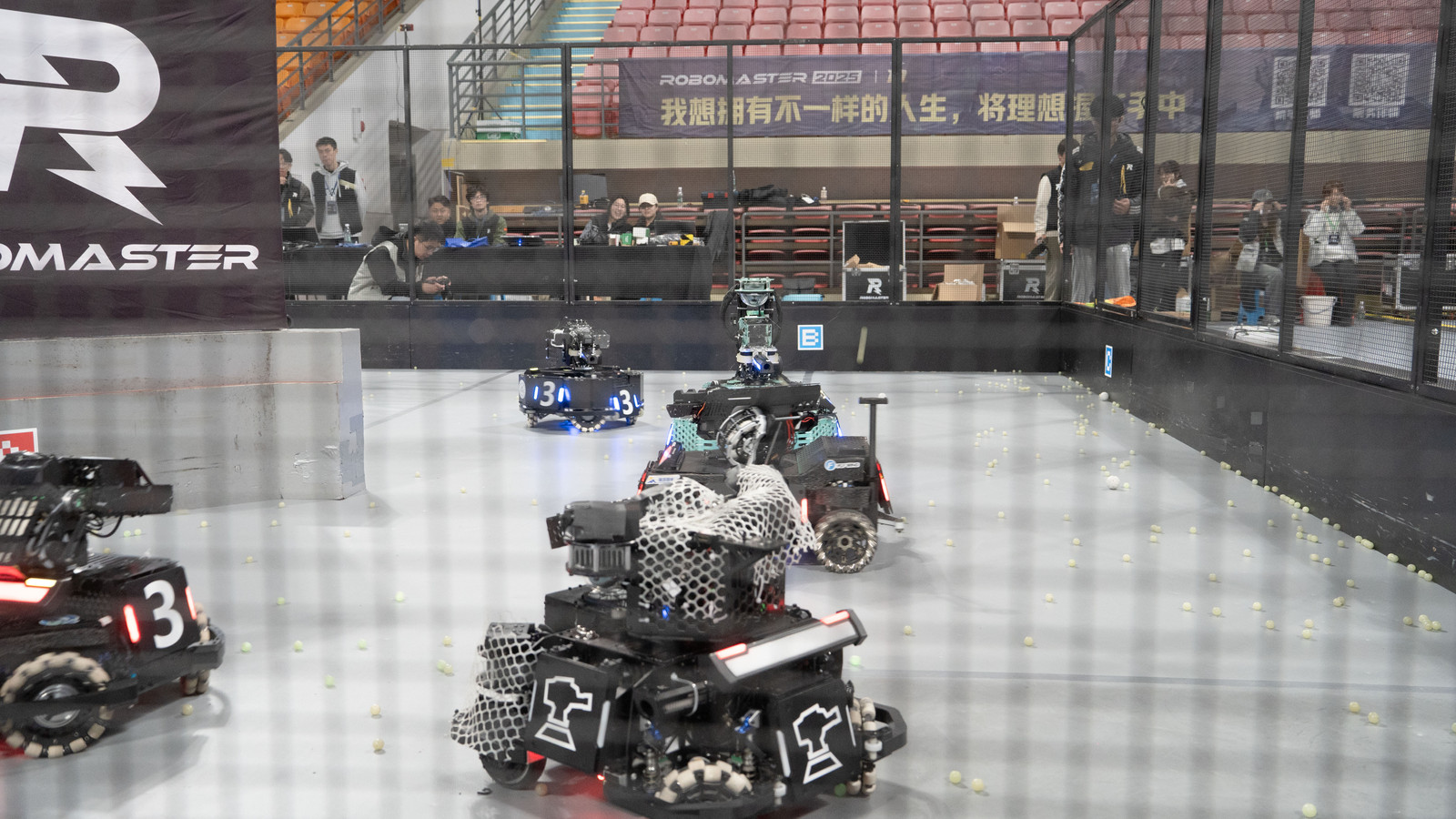
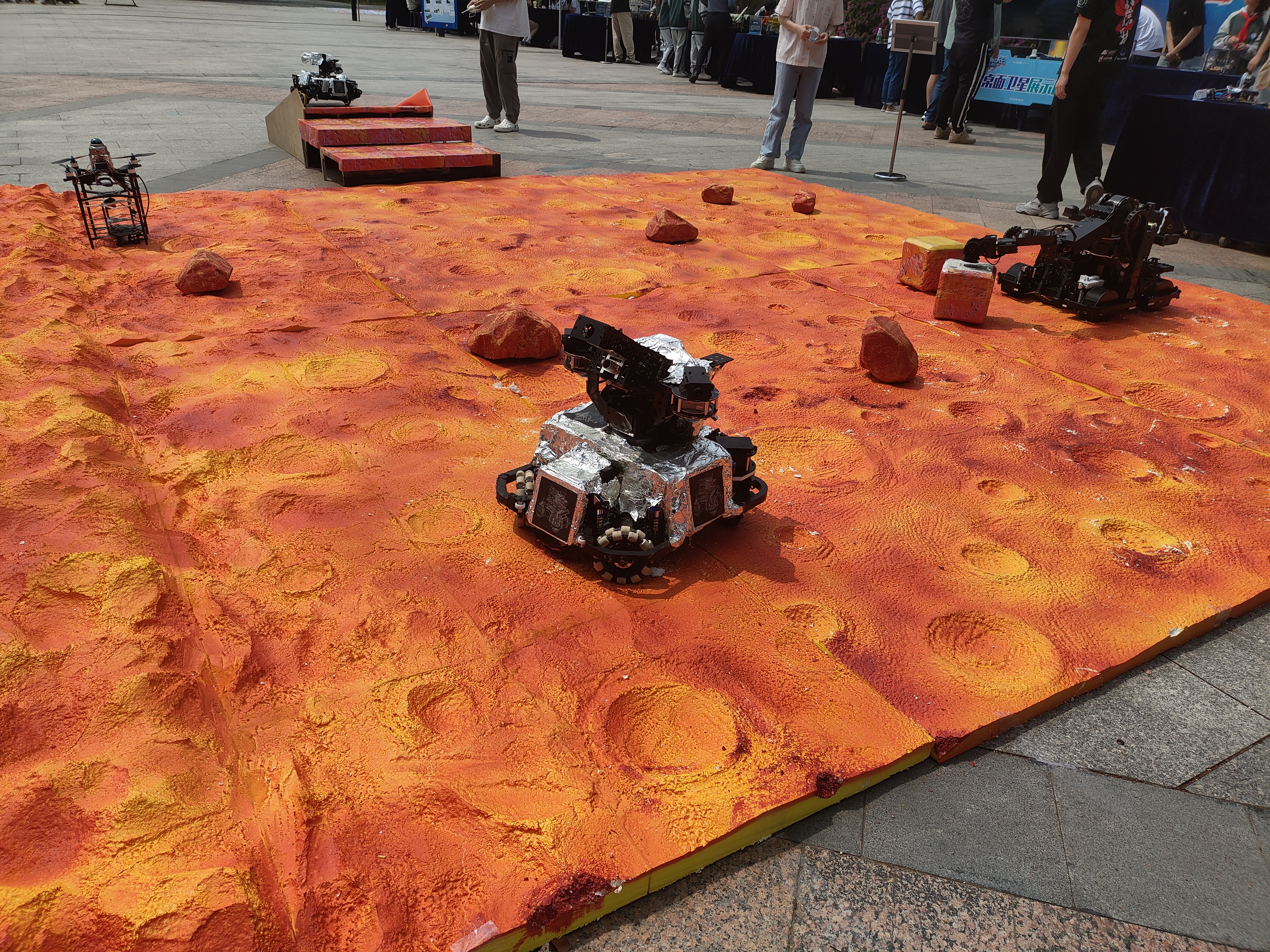
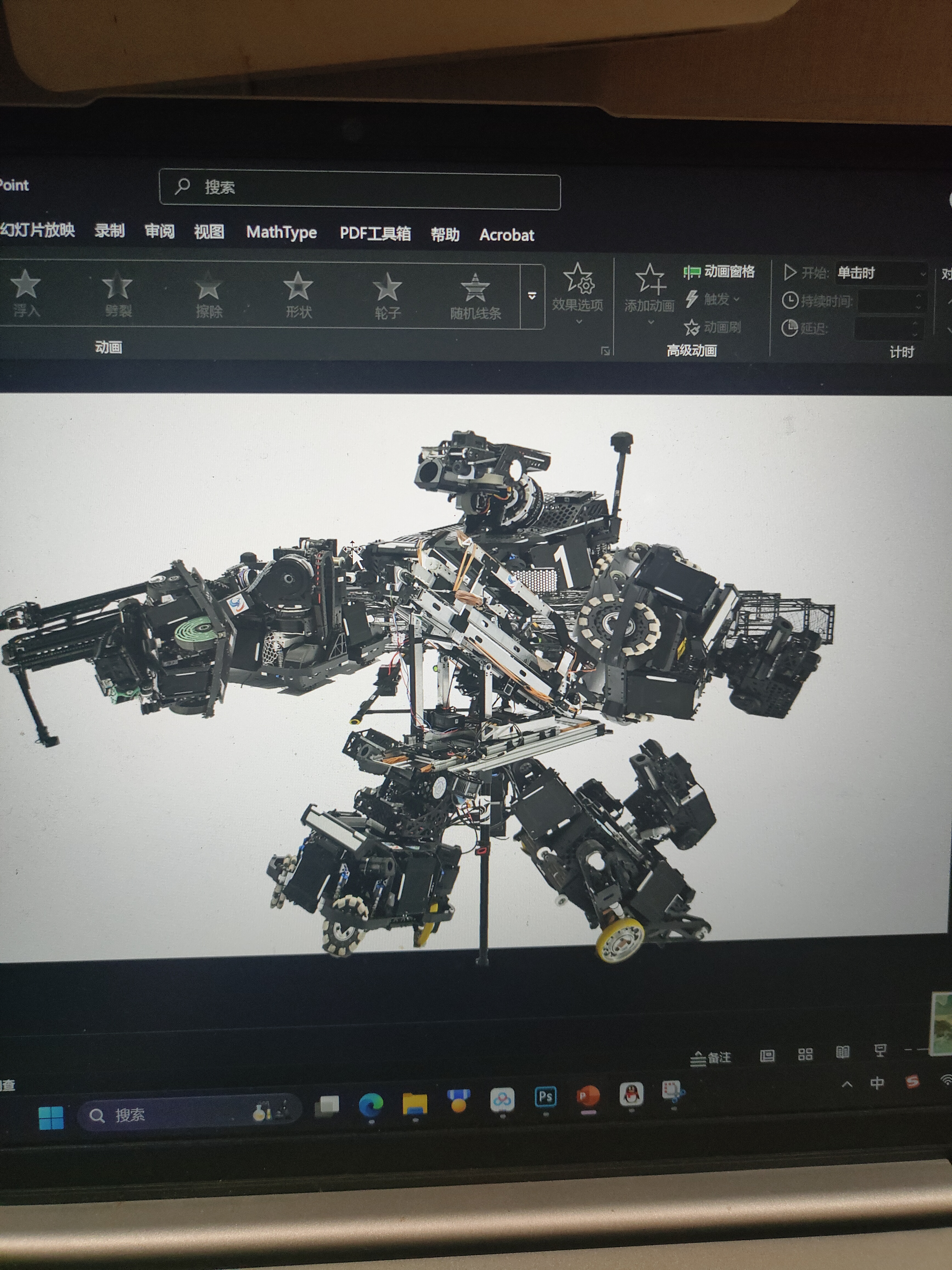
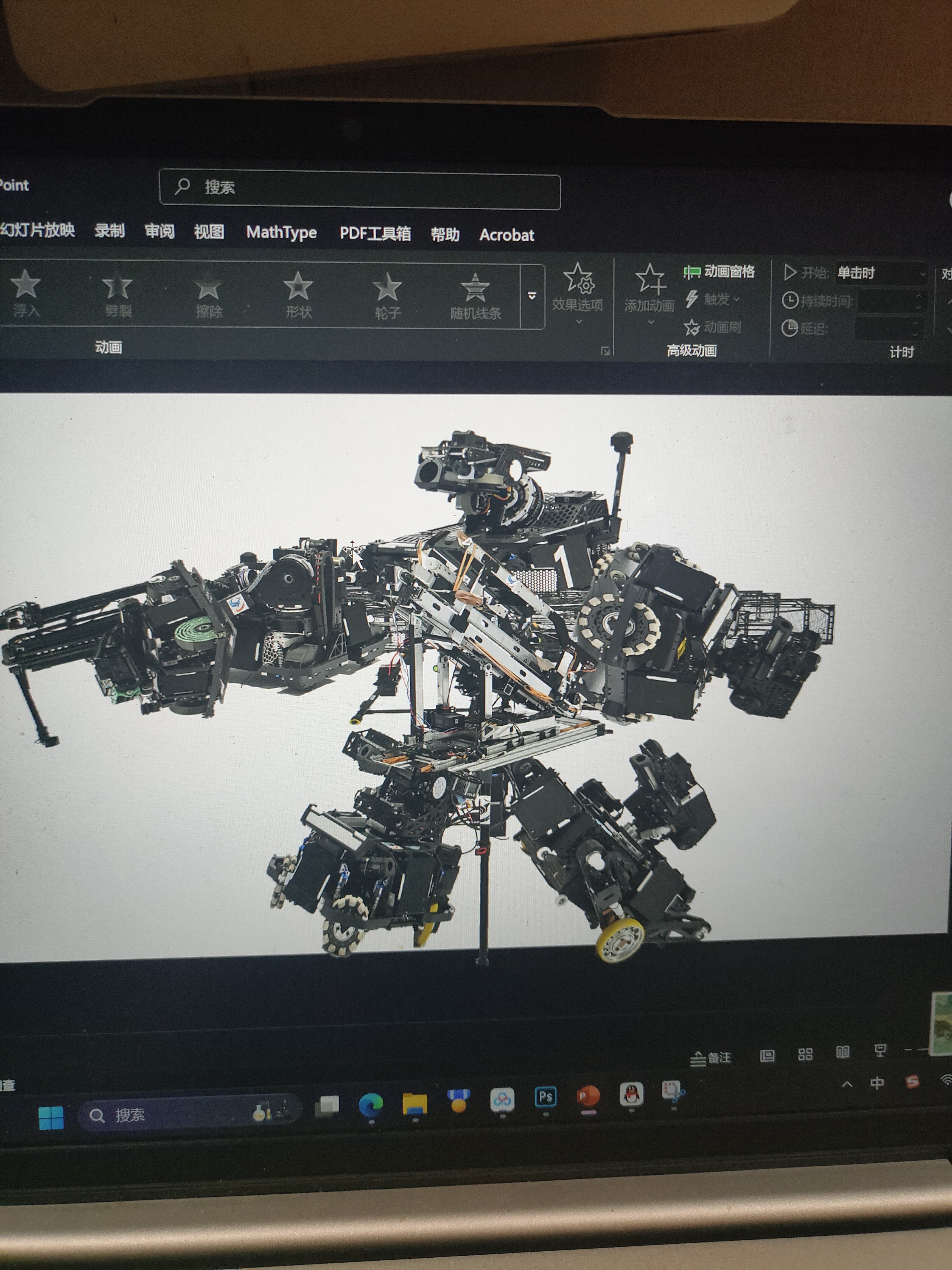
ROBOMASTER 全国一等奖
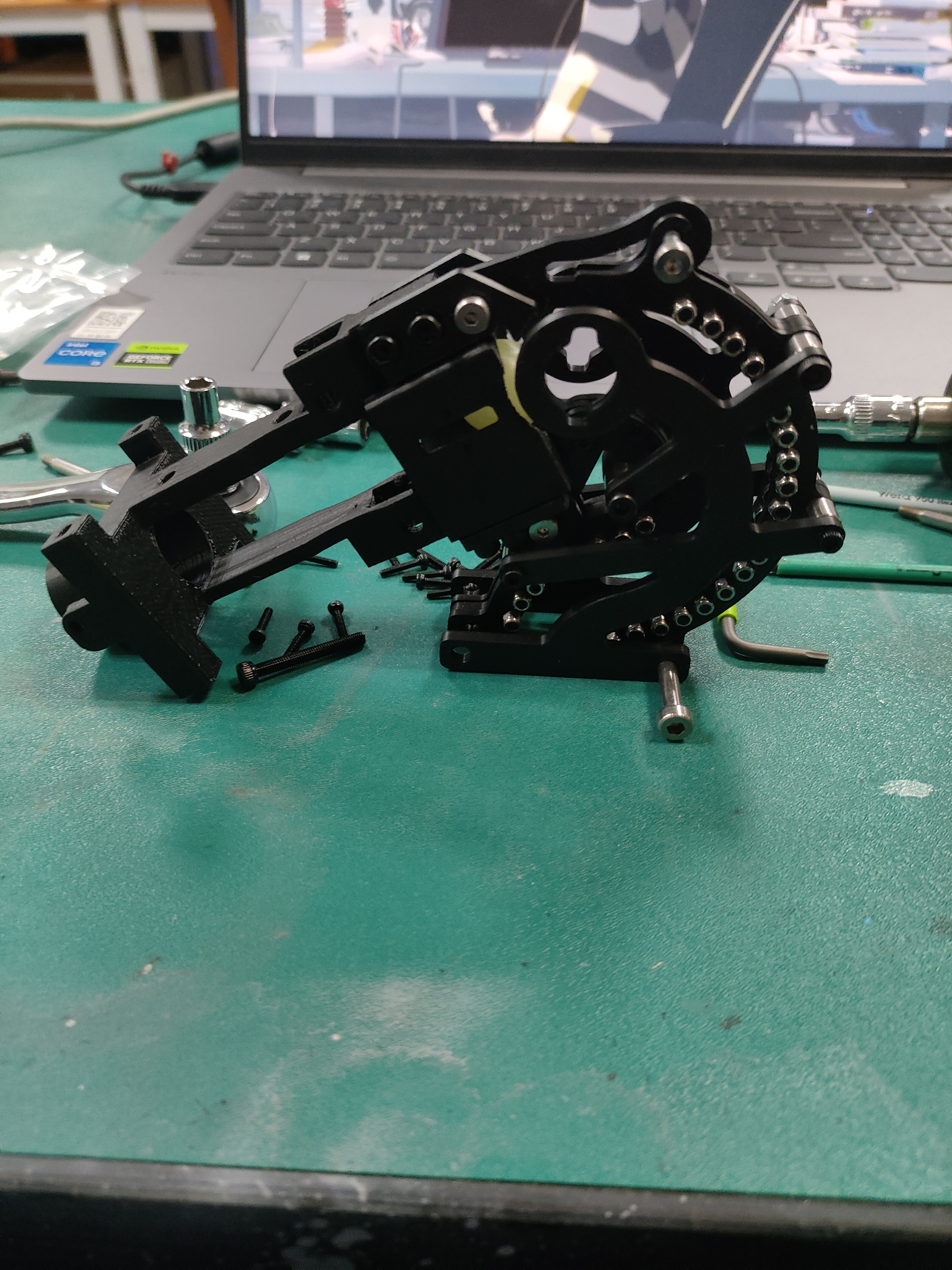
哨兵机器人 · 云台机械负责人
TECH DOSSIER
SENTRY-MK2 / YAW-DUAL / 2025

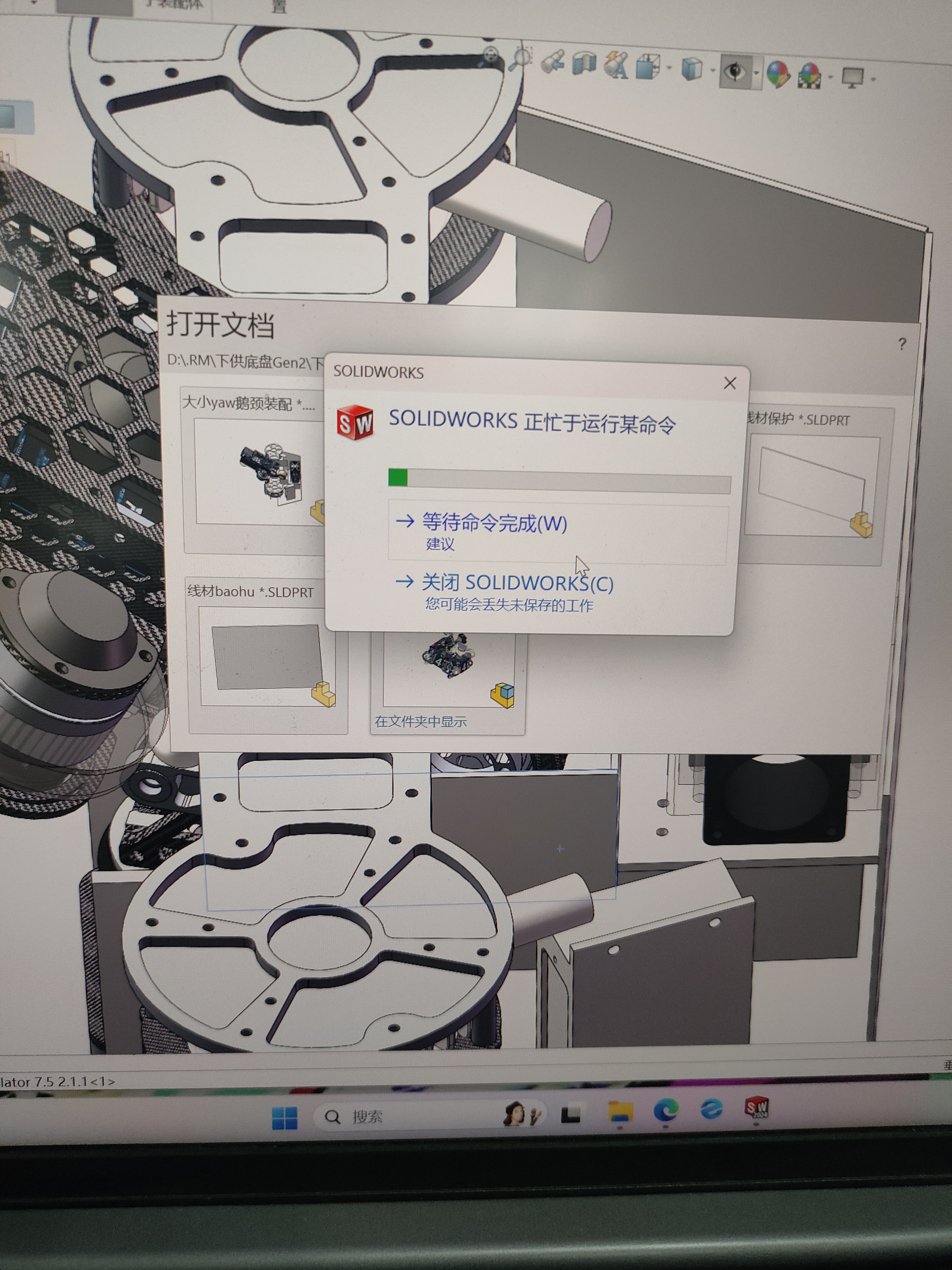
SOLIDWORKS
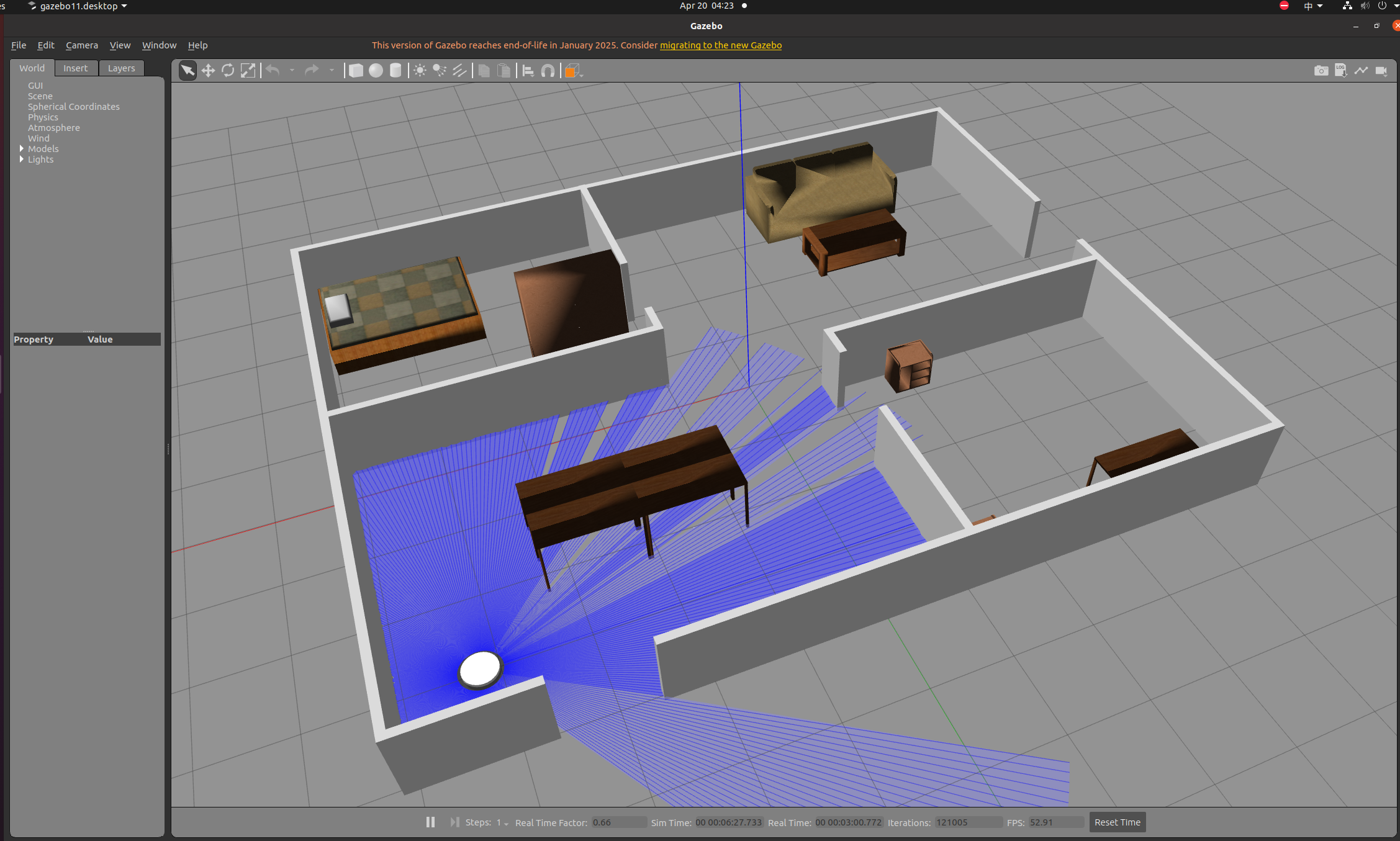
ROS
ANSYS
CAD
C++
SCROLL DOWN